Alumno investigador: Rodrigo García Alcubilla
Estudios: Grado de ingeniería industrial en electrónica y automática. Escuela de ingenierías industriales. Departamento de Ingeniería de sistemas y automática.
Profesor/Tutor: Jaime Gómez García Bermejo
Resumen del proyecto:
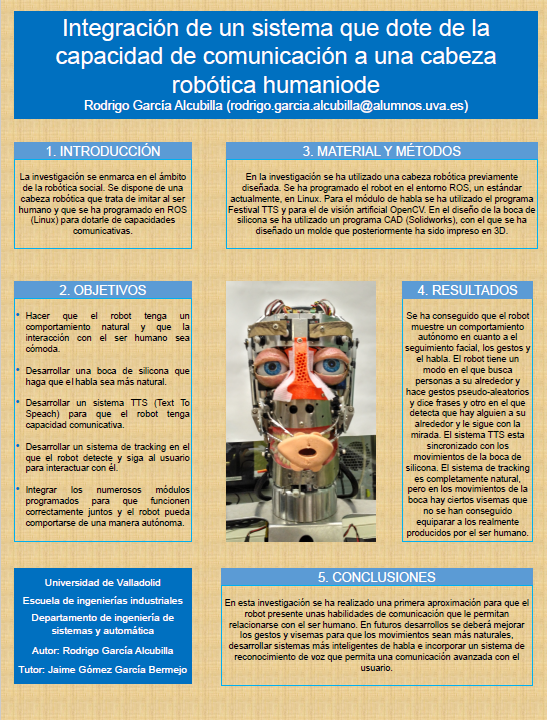
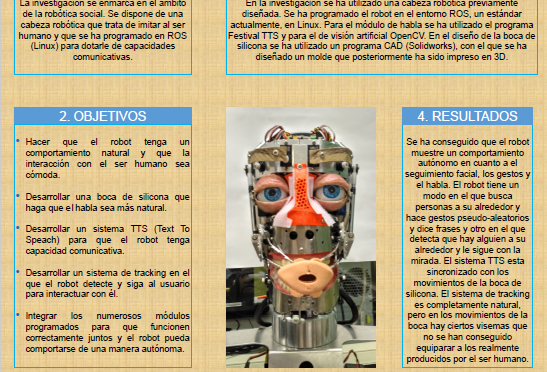
La investigación se enmarcará en el área de la robótica social, que se centra en la interacción de sistemas robóticos con seres humanos.
El objetivo de este proyecto es dotar al robot de la capacidad de comunicación con un ser humano. Durante la investigación se ha intentado que el robot se comunique de la manera más natural y humana posible. Por ello, se ha tratado en paralelo la reproducción de voz y la realización de movimientos de los labios según los fonemas reproducidos. Se ha desarrollado un módulo TTS (Text To Speach) basado en el programa Festival. Este programa no es capaz de proporcionar los visemas en tiempo real, por ello se han utilizado solo frases pre-programadas para la interacción. Se ha utilizado el programa porque los programas TTS open-source más conocidos, que admiten la conversión a fonemas en tiempo real, no funcionan en el entorno Linux.
El robot también cuenta con un sistema de tracking con el cual el robot es capaz de detectar a la persona que está interactuando con él y seguirle de una manera natural.
Otro módulo desarrollado ha sido un gestor de expresiones faciales al que se le encarga realizar un gesto y gestiona el movimiento de los motores del robot para realizar dicho gesto.
Por último, se han unido todos los módulos para generar un comportamiento autónomo. El comportamiento se gestiona con una máquina de estados programada con la librería propia de ROS.
Objetivos alcanzados:
Se ha conseguido que el robot presente un sencillo comportamiento autónomo y que realice ciertas acciones de comunicación propias del ser humano.
Por contra, la boca de silicona instalada no consigue cerrarse y hay ciertos movimientos que no se realizan de manera natural. En futuras investigaciones la boca debería de ser modificada
Sectores de aplicación:
La investigación se enmarca en el ámbito de la robótica social. En los próximos años se incrementará el número de robots que realizarán funciones en el sector servicios. Especialmente en el turismo y en el sector sanitario.
Para que los robots sean aceptados por la sociedad y puedan realizar de la mejor manera sus actividades necesitan capacidades de comunicación naturales para una correcta interacción con el ser humano.
Metodología empleada:
Se han explorado las aplicaciones existentes en robótica social y los desarrollos previos en la propia cabeza robótica.
En base a eso se ha procedido a programar los módulos necesarios en ROS.