Alumno investigador: Carlos Jiménez Jiménez
Estudios: Grado en Ingeniería Electrónica Industrial y Automática. Escuela de Ingenierías Industriales. Departamento de Automática
Profesor/ Tutor: Eduardo Zalama Casanova
Resumen del proyecto:
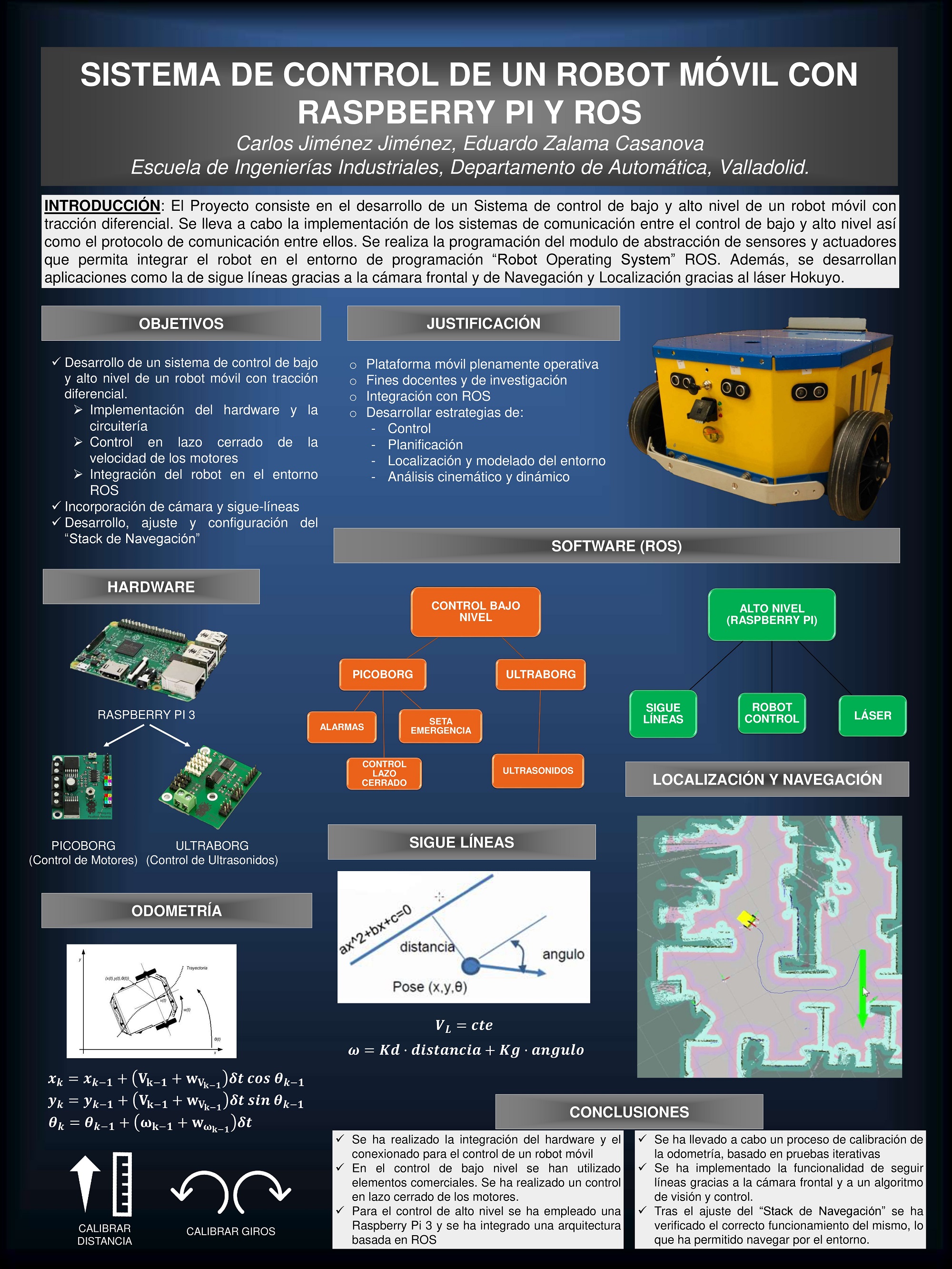
El presente proyecto consiste en el desarrollo de un sistema de control de bajo y alto nivel de un robot móvil con tracción diferencial. Se llevará a cabo la implementación de los sistemas de comunicación entre el control de bajo nivel (microcontrolador) y el de alto nivel (raspberry PI) así como el protocolo de comunicación entre ambos. Además, se realizará la programación del módulo de abstracción de actuadores y sensores que permita integrar el robot en el entorno de programación “Robot Operating System” (ROS).
La plataforma a automatizar se compone de un chasis, dos motores de corriente continua con realimentación basada en codificador incremental, un conjunto de sensores ultrasónicos dispuestos en la periferia del robot, sensores de contacto en la parte frontal y trasera del robot, cámara frontal para la función sigue líneas y un láser “Hokuyo” para la detección de obstáculos y localización mediante mapas.
Sectores de aplicación:
El objetivo final de este proyecto pretende desarrollar una plataforma plenamente operativa que pueda ser usada con fines docentes y de investigación. En estos campos permitirá, por ejemplo, el desarrollo de nuevas estrategias de control, planificación, localización, modelado del entorno, navegación y análisis cinemático y dinámico, además de aplicaciones en robótica como el rastreo de zonas peligrosas de forma remota y la capacidad de obtener datos e imágenes, la navegación autónoma en entornos de trabajo y diversas tareas programadas que faciliten el trabajo de las personas.
Objerivos alcanzados:
-Desarrollo de un sistema de control de bajo y alto nivel de un robot móvil con tracción diferencial.
-Implementación del hardware y la circuitería.
-Control en lazo cerrado de la velocidad de los motores.
-Integración del robot en el entorno ROS.
-Incorporación de cámara y la funcionalidad de seguir líneas.
-Desarrollo, ajuste y configuración del “Stack de Navegación” que permite
modelar el entorno y navegar por el.
Metodología empleada:
Lo primero de todo se realizó un esquema eléctrico del conexionado de todos los elementos Hardware que se iban a utilizar y posteriormente se implementó en el propio chasis del robot.
En cuanto al Software, se llevó a cabo un amplio y profundo estudio del entorno ROS (Robot Operating System) para su posterior desarrollo ya que se trataba de un campo nuevo y desconocido.
Finalmente, se implementaron las funcionalidades de seguir líneas, gracias a un algoritmo de visión y control; de localización y navegación mediante láser.